McMaster Cadathon 2025
The McMaster CAD Designathon 2025, organized by the McMaster Design League (MDL), is a comprehensive, day-long event dedicated to advancing skills in computer-aided modeling (CAD), mechanical design, and rapid prototyping. It aims to foster collaboration and enhance problem-solving abilities among participants.
Prompt
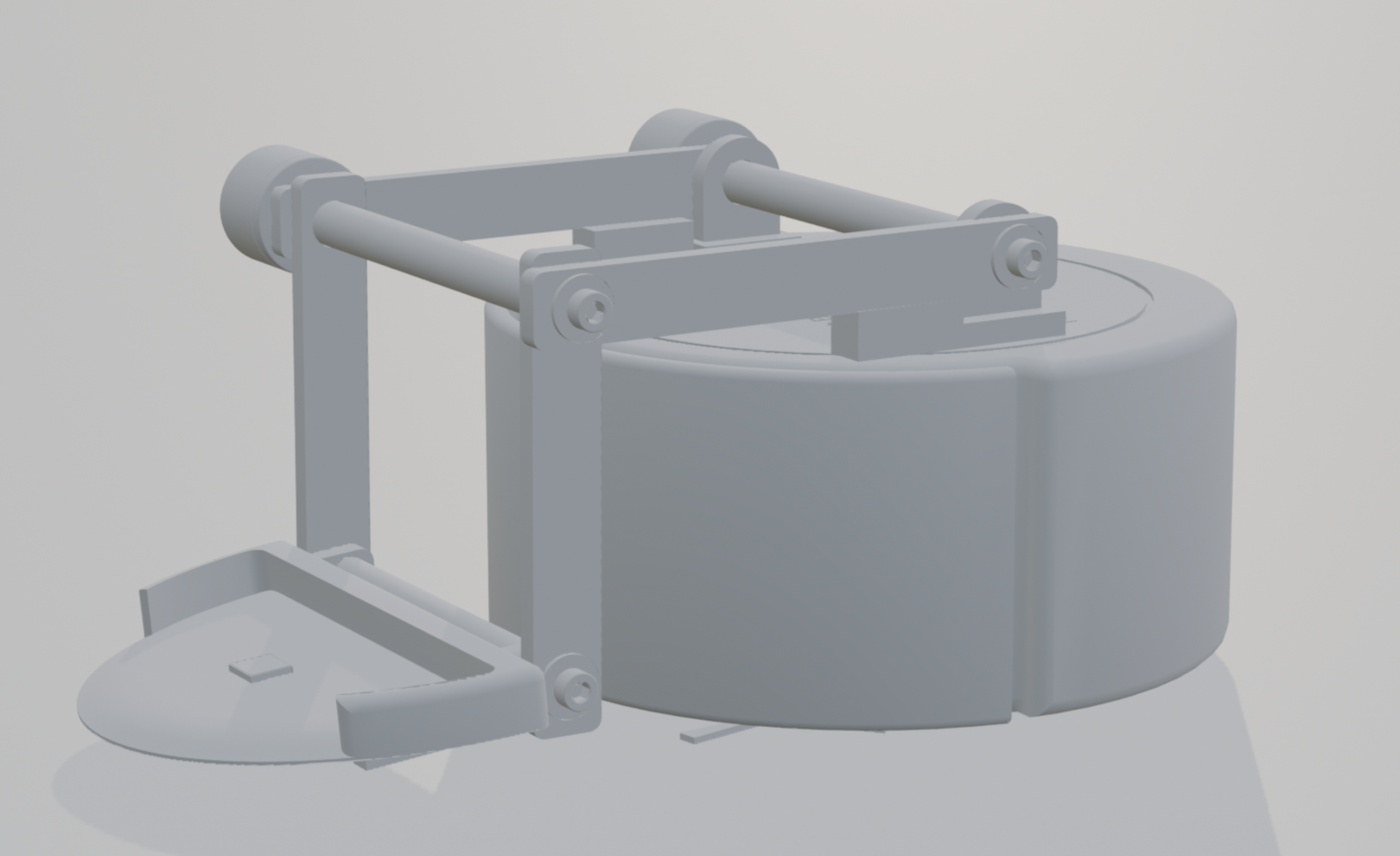
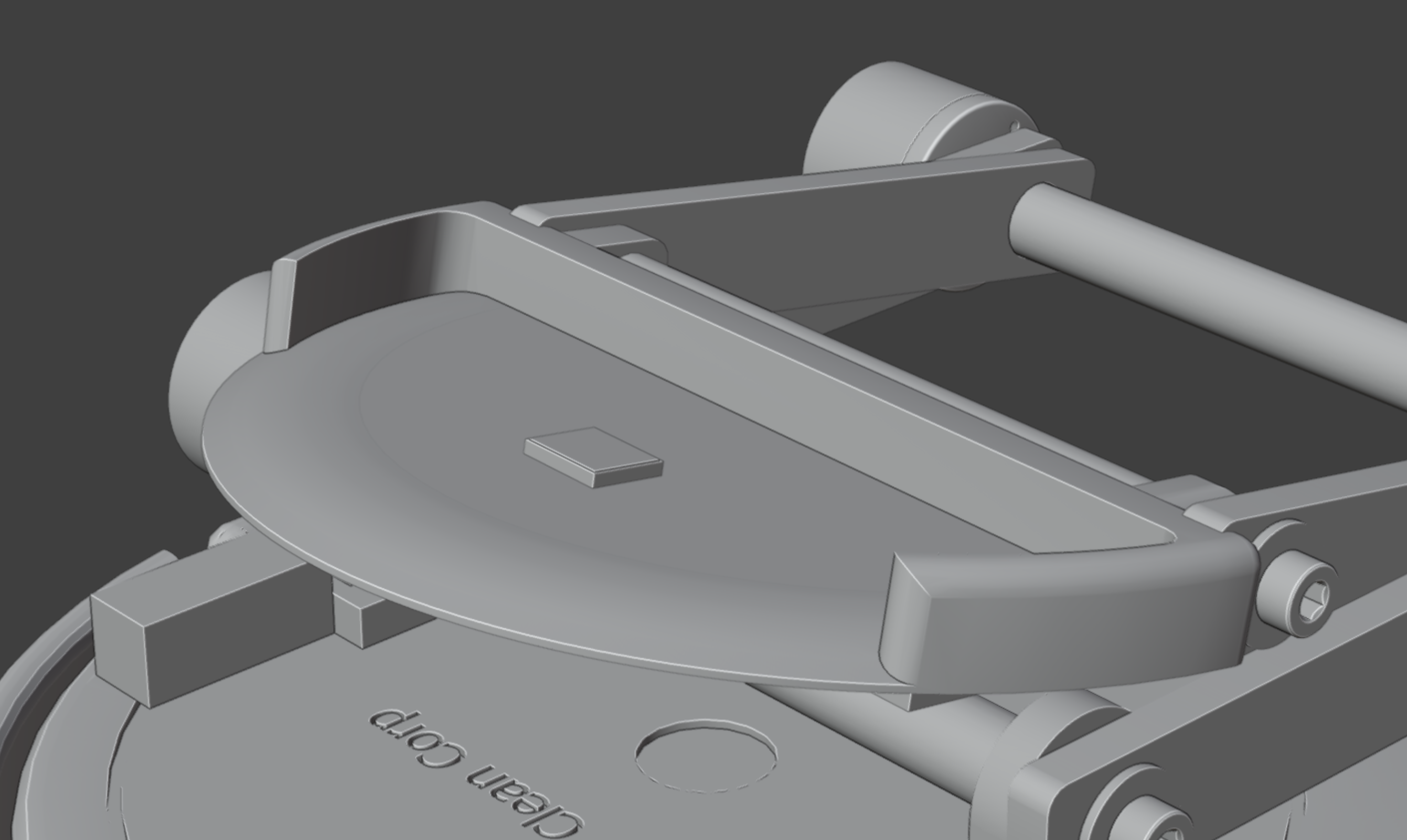
The year is 2025. As a team of recently graduated engineers who can’t find jobs, you're ecstatic when a robotic vacuum cleaner company Clean Corp, is so impressed with your LinkedIn, they contact you about a seasonal contract! You are so desperate you take it immediately.
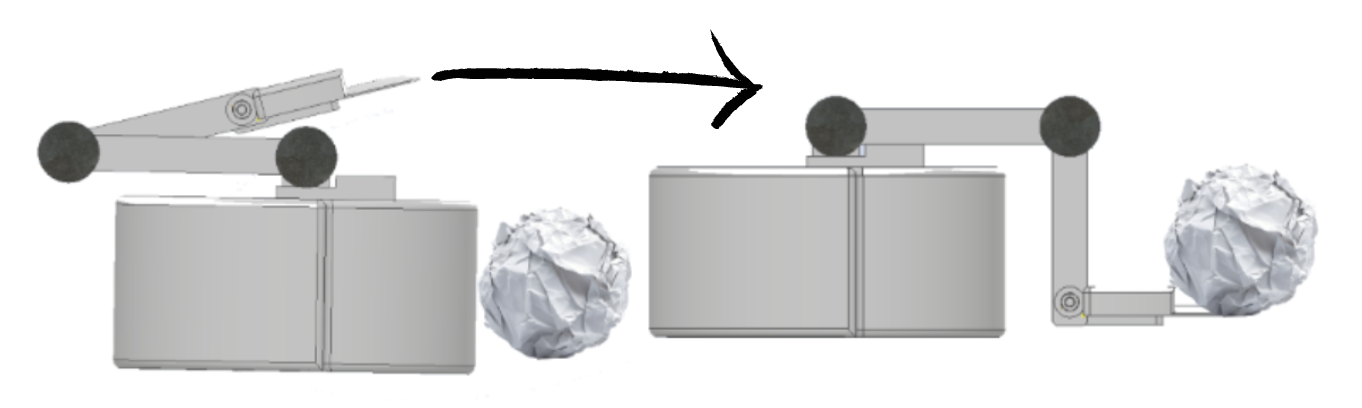
Upon a meeting, Clean Corp reveals that although their robotic vacuum cleaner “Dirt Bot” is great at keeping floors clean, customers think they're just too boring! Clean Corp has asked you to design an attachment that helps with another household task put onto Dirt Bot. Clean Corp doesn’t want to change their production lines, so anything you design/modify must be a realistic adjustment that can be made using a standard Dirt Bot. (complete remodification is not allowed).


What were the requirements?
1
Mechanical Design
Prioritize modifying or adding mechanical components like motors and fasteners. Software, hardware, or coding components are not mandatory.
2
Size & Modification Constraints
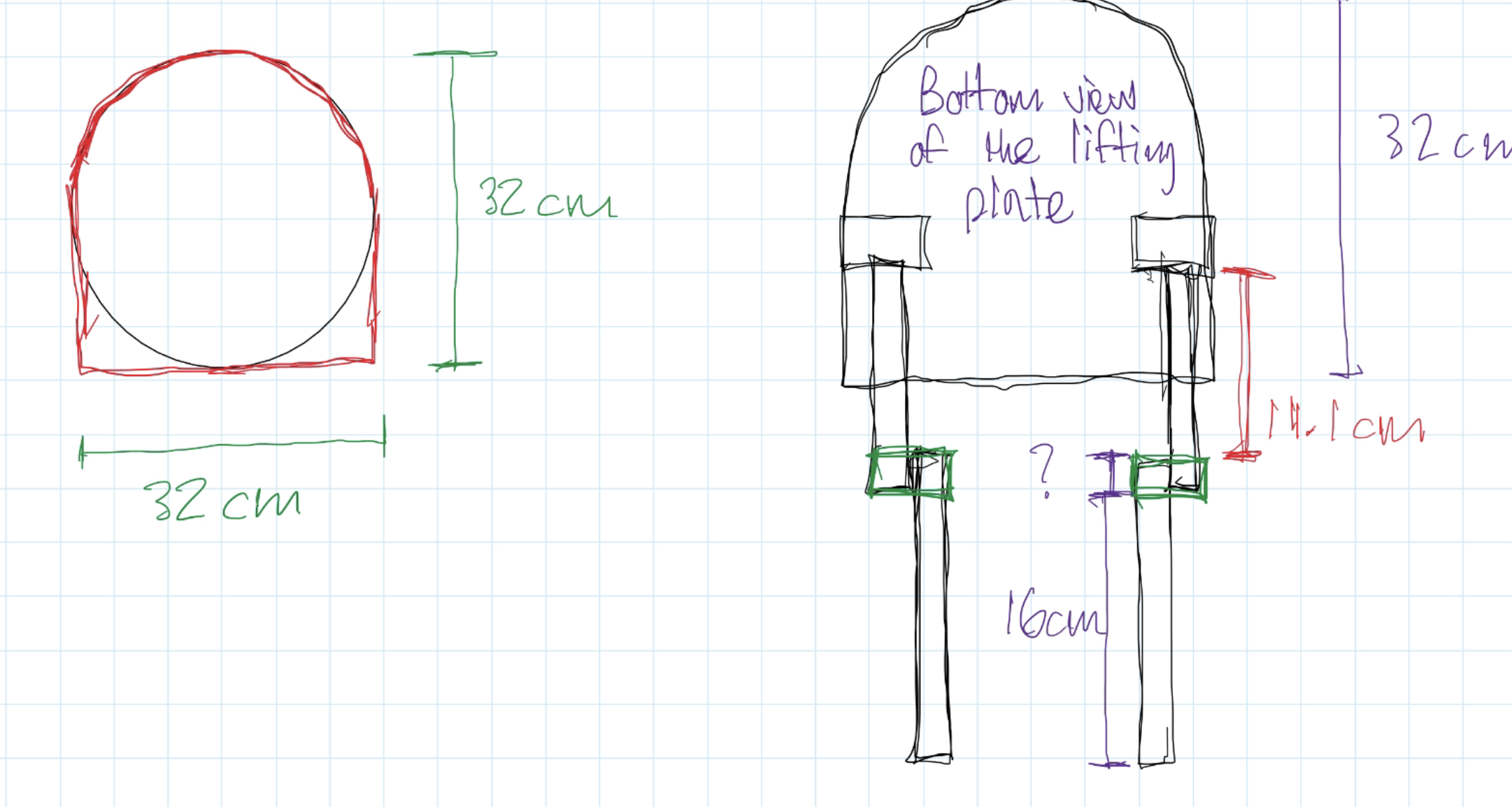
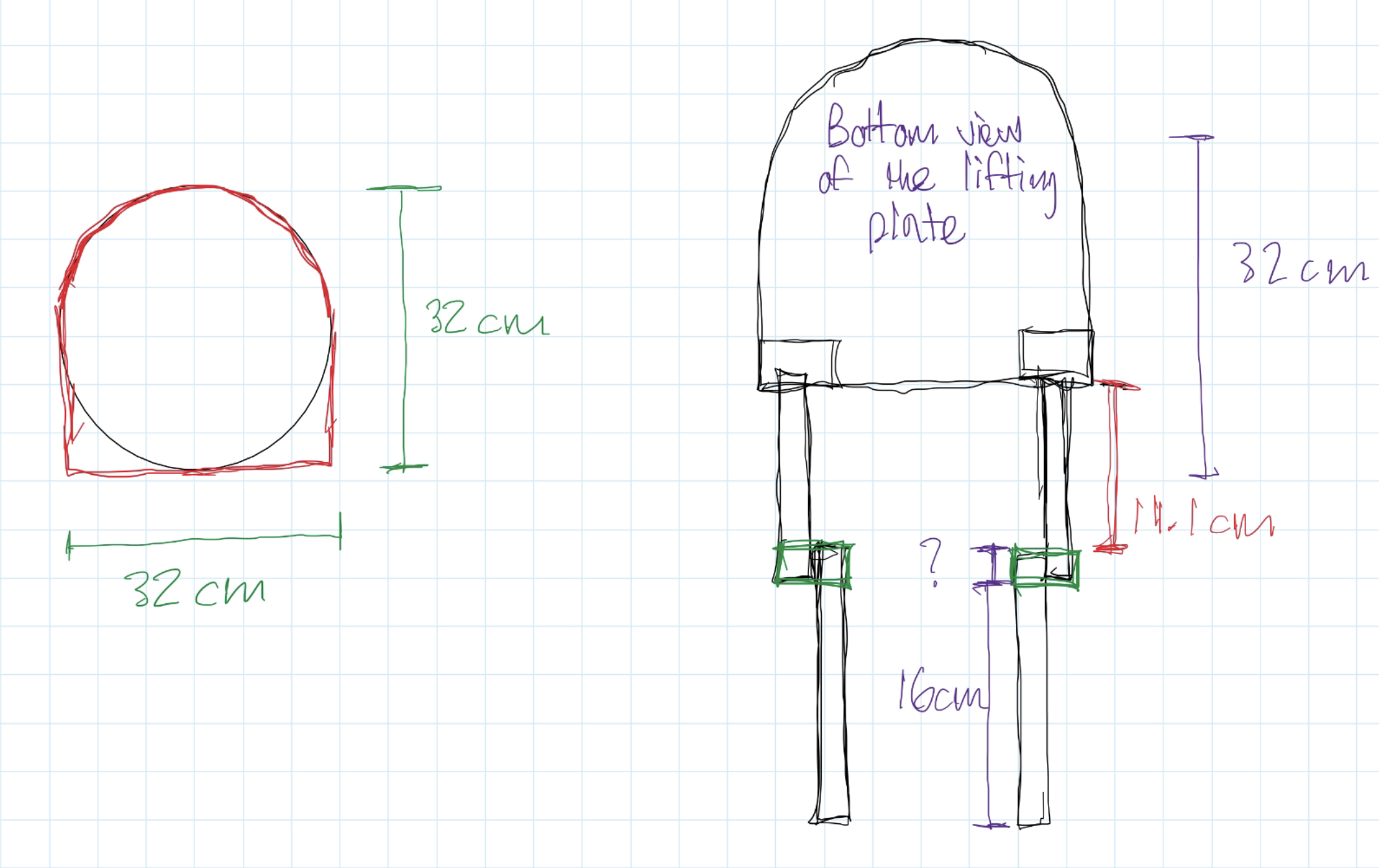
The attachment must fit within 750x750x500 mm. Only the lid can be modified, with minimal changes to the rest of the bot.
3
Functionality
The Dirt Bot must still function as a vacuum cleaner after modifications. And the design can not interfere with its primary cleaning ability.
4
Realism & Feasibility
The design had to be practical, achievable, an manufacturable with current materials and technology.